
Использование обучения
Искусственная нейронная сеть обучается посредством некоторого процесса, модифицирующего ее веса. Если обучение успешно, то предъявление сети множества входных сигналов приводит к появлению желаемого множества выходных сигналов. Имеется два класса обучающих методов: детерминистский и стохастический.
Детерминистский метод обучения шаг за шагом осуществляет процедуру коррекции весов сети, основанную на использовании их текущих значений, а также величин входов, фактических выходов и желаемых выходов. Обучение персептрона является примером подобного детерминистского подхода (см. гл. 2).
Стохастические методы обучения выполняют псевдослучайные изменения величин весов, сохраняя те изменения, которые ведут к улучшениям. Чтобы увидеть, как это может быть сделано, рассмотрим рис. 5.1, на котором изображена типичная сеть, в которой нейроны соединены с помощью весов. Выход нейрона является здесь взвешенной суммой его входов, которая, преобразована с помощью нелинейной функции (подробности см. гл. 2). Для обучения сети может быть использована следующая процедура:
Выбрать вес случайным образом и подкорректировать его на небольшое случайное Предъявить множество входов и вычислить получающиеся выходы.
Сравнить эти выходы с желаемыми выходами и вычислить величину разности между ними. Общепринятый метод состоит в нахождении разности между фактическим и желаемым выходами для каждого элемента обучаемой пары, возведение разностей в квадрат и нахождение суммы этих квадратов. Целью обучения является минимизация этой разности, часто называемой целевой функцией.
Выбрать вес случайным образом и подкорректировать его на небольшое случайное значение. Если коррекция помогает (уменьшает целевую функцию), то сохранить ее, в противном случае вернуться к первоначальному значению веса.
Повторять шаги с 1 до 3 до тех пор, пока сеть не будет обучена в достаточной степени.
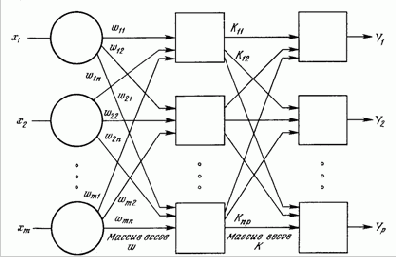
Рис. 5.1. Двухслойная сеть без обратных связей
Этот процесс стремится минимизировать целевую функцию, но может попасть, как в ловушку, в неудачное решение. На рис. 5.2 показано, как это может иметь место в системе с единственным весом. Допустим, что первоначально вес взят равным значению в точке А. Если случайные шаги по весу малы, то любые отклонения от точки А увеличивают целевую функцию и будут отвергнуты. Лучшее значение веса, принимаемое в точке В, никогда не будет найдено, и система будет поймана в ловушку локальным минимумом, вместо глобального минимума в точке В. Если же случайные коррекции веса очень велики, то как точка А, так и точка В будут часто посещаться, но то же самое будет иметь место и для каждой другой точки. Вес будет меняться так резко, что он никогда не установится в желаемом минимуме.